

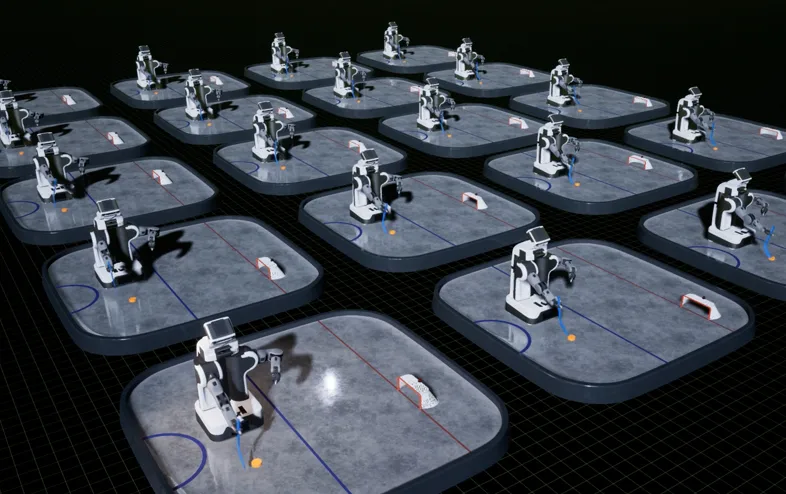
A Nvidia Research publicou nesta quarta-feira novos resultados demonstrando como robôs treinados em ambientes virtuais conseguem transferir habilidades aprendidas para executar tarefas em situações reais e imprevisíveis — um marco na área conhecida como transferência de simulação para o mundo real (simulation-to-real transfer).
A pesquisa, apresentada antes da Conferência Internacional de Robótica e Automação (ICRA) em Viena, reúne oito dos 28 artigos da Nvidia aceitos no evento, com foco específico em como superar a lacuna entre o treinamento simulado e a aplicação em ambientes físicos. A ICRA 2026, principal conferência de robótica do IEEE, acontece de 1º a 5 de junho.
Da Simulação à Implantação
Os artigos cobrem uma série de capacidades, incluindo navegação robótica, preensão e montagem, com robôs aprendendo a perceber, raciocinar, planejar e agir em ambientes dinâmicos. Entre os resultados destacados está uma aceleração de 3x em cenários de planejamento com múltiplos braços rodando no hardware Nvidia Jetson.
O trabalho se baseia na iniciativa mais ampla da Nvidia no que ela chama de “IA física” — sistemas capazes de entender e interagir com o mundo físico. Na GTC 2026, em março, a empresa apresentou diversas ferramentas para acelerar o desenvolvimento de robôs, incluindo os modelos abertos Isaac GR00T para controle de robôs por linguagem natural, geração de dados sintéticos por meio dos modelos de mundo Cosmos e o motor de física de código aberto Newton 1.0 para manipulação de precisão.
Um Pipeline em Maturação
A abordagem de simulação como ponto de partida para a robótica vem ganhando espaço em toda a indústria. A plataforma Isaac Sim, da Nvidia, permite que desenvolvedores modelem cenários e validem sistemas antes da implantação no mundo real, enquanto o Isaac Lab oferece frameworks para treinamento de políticas em larga escala. O Toyota Research Institute e a Mimic Robotics utilizaram os modelos de fundação de mundo Cosmos, da Nvidia, para treinar robôs que precisam de menos dados do mundo real — a Mimic relatou uma eficiência de amostragem 10 vezes maior em tarefas de manipulação.
Na ICRA 2026, o pesquisador da Nvidia Yuke Zhu deverá explorar abordagens centradas em dados para a autonomia robótica de propósito geral, incluindo como dados do mundo real, sintéticos e da web se combinam para construir sistemas mais capazes.
Contexto do Setor
A conferência chega em um momento em que as empresas de robótica estão migrando de demonstrações isoladas para implantações em escala. A biblioteca cuMotion da Nvidia, que oferece planejamento de movimento acelerado por CUDA integrado ao ROS 2, é um exemplo da infraestrutura que sustenta essa transição. A plataforma de computação de borda Jetson da empresa realiza inferência diretamente no dispositivo, permitindo que os robôs tomem decisões sem depender de conectividade com a nuvem.
“A robótica está entrando em uma nova fase: deixando para trás as demos controladas e a automação baseada em scripts para avançar em direção a uma autonomia corporificada, generalizável e confiável no mundo real”, afirmou a Nvidia em seu comunicado.
#Nvidia #robôshumanoides





